embeddiNg kEts and Works based learning into MEchaTROnic profile
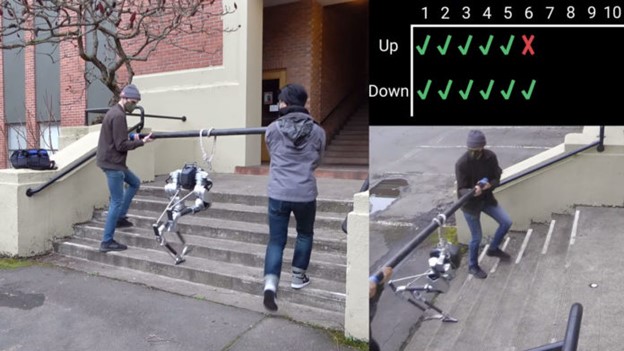
Blind bipedal robot learns to climb stairs
Blind bipedal robot learns to climb stairs
A team of researchers from Oregon State University has accomplished the feat with a bipedal robot called Cassie from Agility Robotics. The team trained the blind bipedal robot to navigate stairs – without any perception sensors such as LiDAR or cameras – in a simulator.
Researchers say robots can’t always rely completely on cameras or other sensors. With such possible conditions as dim lighting or fog, movement can be challenging. To solve this issue, Agility Robotics’ bipedal robot ‘Cassie’ is trained to navigate an unknown environment through ‘proprioception,’ or body awareness.
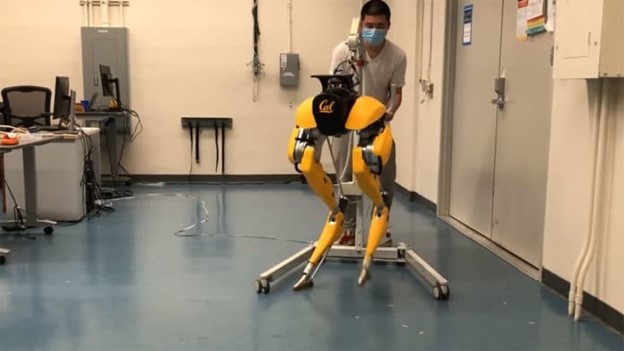
The team used the technique called sim-to-real Reinforcement Learning (RL), which virtually established how Cassie will walk. For such blind bipedal locomotion, the training will involve many falls and crashes, especially early in training. To avoid this, the simulator allows the robot to train without damaging itself.
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.Ok